A few months ago I've posted some other platforms I've been working on, all made from scratch:
Ara (
http://www.societyofrobots.com/robotforum/index.php?topic=8523.msg66293#msg66293)
and
Twinmotion (
http://www.societyofrobots.com/robotforum/index.php?topic=7435.msg56990#msg56990)
With a few changes made to ARA (4 geared motors instead of two, one for each wheel), I've made another step with my Perseus robots saga (
http://www.pocketmagic.net/?p=520) , and put together Perseus 3.
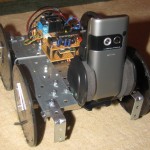
Features:
- powerful propulsion given by 4 geared motors (see
platform)
- differential control (tank like), driven by a dual 10A HBridge (see
schematics)
- atmega8 board for gathering sensor data and sending commands to the HBridge
- bluetooth interface for the atmega8
- Smartphone running Windows Mobile 6.0, basically this is the wonder: a small processing unit, low power requirements, capable of providing a 200MHz embedded CPU, WLAN, Bluetooth (for atmega8 interlink), Camera, Phone, Speakerphone, Microphone and so on.
I have some experience programming for Windows Mobile, so I'll start the brain coding part.
It should include image processing, voice command recognition and other advanced features to turn this robot into an autonomous one.
Currently I've been able to use the robot by remote control (Direct link from my computer over bluetooth and using Hyperterminal) and get the images from the smartphones camera using the WLAN and direct IP connection.
Progress can be tracked here, or on my blog:
http://www.pocketmagic.net/?p=869Looking forward to your suggestions!

