Lets say I have an optical encoder, it resembles this:
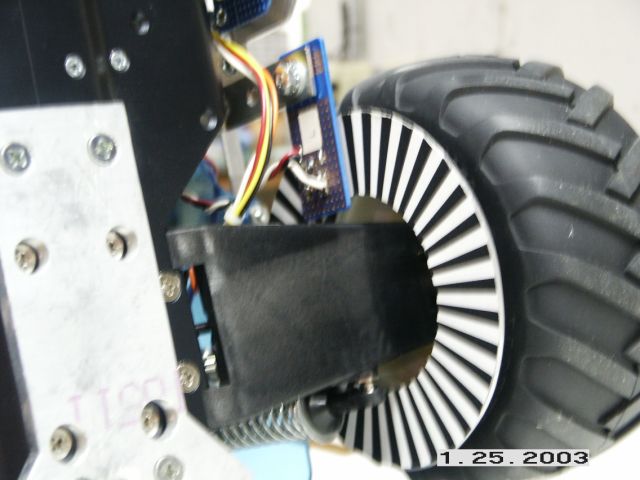
You see how the IR emitter detector pair is placed looking at the center of the encoder? Would there be any difference in resolution if I moved the pair upwards so that it is looking at the top portion of the encoder or if I moved in downwards so its looking at teh bottom of encoder?
Basically I am asking, would where the IR pair is positioned affect the accuracy of the encoder. Like if I put the IR pair more towards the center of the encoder , would I have a different encoder resolution then if I put the IR pair towards the edge of the encoder? Or is it only the number of "clicks" the encoder has that sets resolution?

