1
« Last post by angelatom on Yesterday at 10:16:51 PM »
Hi, i'm a begginer i just start in this and i hope find help for my futures projects
I am a new member. Can you share about the projects you have completed?
2
« Last post by artbyrobot1 on May 07, 2024, 01:54:12 PM »
My concern on implementing "emotions" in my AI is that I don't want to promote the idea that robots can ACTUALLY have emotions because I don't believe that is possible nor ever will be. They don't have a spirit or soul and never will nor could they. They are not eternal beings like humans. They don't have a ghost that leaves their body and can operate after the body dies like humans. The ghost is what has emotions. A machine can't. And yet people already believe even the most primitive AI has emotions and they are delusional on this point. Or ill informed. So I am campaigning against that belief that is becoming all too popular. That said, I think robots are simply more interesting and fun to pretend to have emotions and act accordingly as more accurate simulations or emulations of human life. This makes them all the more intriguing. It's like a sociopath who just logically concludes what emotion they aught to be feeling at a given point in time and pretends to feel that emotion to fit in with society even though they feel nothing in that moment. Now one could argue that allowing your robot to claim to feel anything is lying and therefore immoral. I think it's not lying as long as the robot openly explains it is only pretending to have emotions as part of its emulating of humans in its behaviors and looks but does not feel anything ever nor can it nor can any robot ever feel a thing EVER. Then it is admitting the truth of things while still opting to play act to be like a human in this regard. It would not be a issue at all if everyone was sound minded and informed on this topic. But the more people I come across that think AI (even pathetic clearly poorly implemented primitive AI) is sentient ALREADY and can feel real emotions and deserves human rights as a living being.... the more I see this delusion spreading, the more I want to just remove all mention of emotion in my robot so as to not spread this harmful deception going around which disgusts me. However, that would make my robot dull and less relatable and interesting. So I feel the compromise is for the robot to clearly confess it's just pretending out emotions and explain how that works and it's just a variable it sets based on circumstances that would make a human feel some emotion and it sets its emotion variable to match and acts accordingly altering its behavior some based on this emotion variable and that it feels nothing and this is all just logically set up as a emulator of humans. As long as it gives that disclaimer early and often with people, then I'm not spreading the lie of robot emotions being real emotions and the robot can campaign actively against that delusion.
3
« Last post by artbyrobot1 on May 06, 2024, 01:12:57 PM »
I just bought EMEET USB Speakerphone M0 4 AI Mics Speakerphone for Conference Calls 360? Voice Pickup Conference Speakerphone for Computer Plug and Plays Computer Speaker with Microphone for 4 People --- it was around $33 and includes a speaker too. I'll position it centrally in the skull and it has leds indicating location of main speaker which we can tap into with analog input pins of a microcontroller to know direction of person speaking. It has very high reviews. I can remove its built in speaker and move it to near mouth so it outputs its audio output through the mouth as loud as possible and projects the robot's voice as far as possible. People are really happy with its sound quality and speaker quality.
4
« Last post by artbyrobot1 on May 03, 2024, 02:00:04 PM »
 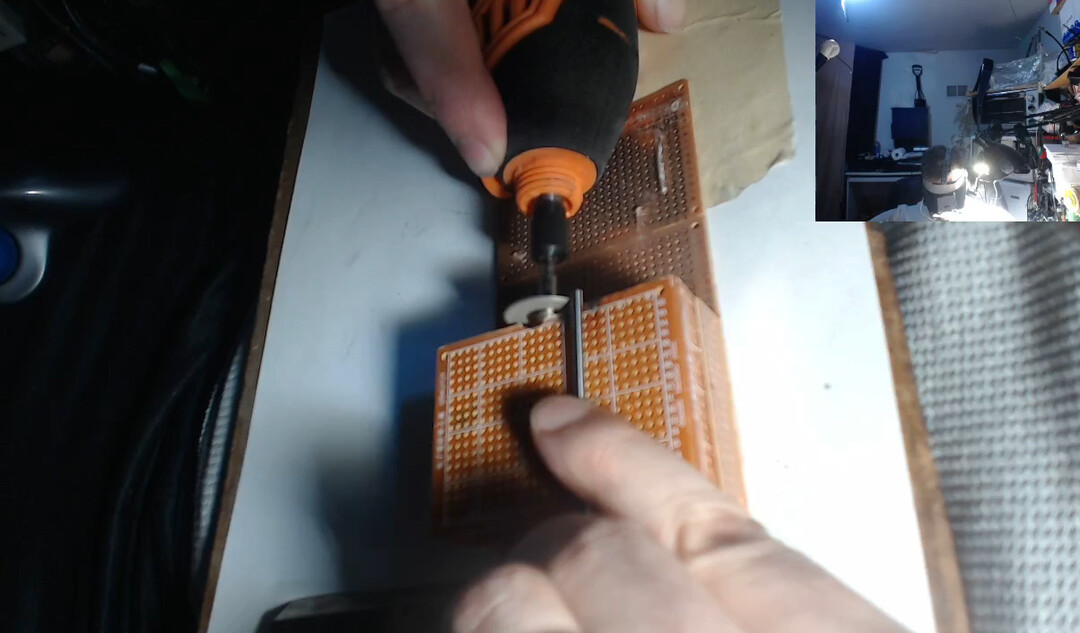 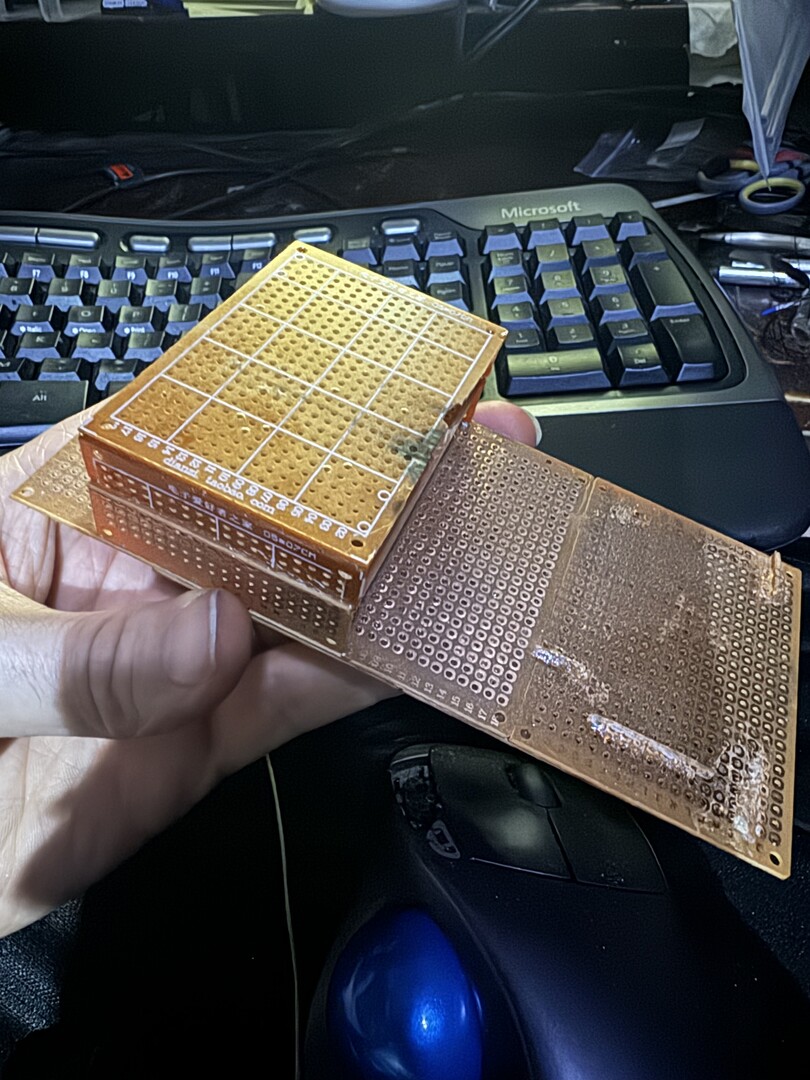 Here are some plain bearings parts I made with my Wen rotary tool (aka dremel) with diamond disc attachment and some files. They are made by carefully cutting stainless steel tubing (purchased on Amazon) into short 1mm lengths. The tubing is:stainless steel tubing 3mm OD 1mm wall 250mm length $5, 5mm OD 0.8mm wall 250mm length $5. These should make around 125 plain bearings (accounting for 1mm+ lost per cut in wasted length of metal). So that's about $0.08 per plain bearing. These are intended to be 1x5x1mm plain bearings. I mean they are basically like a wheel and an axle with the axle having a hole through the center of it lengthwise. These will go into the last few pulley slots in my Archimedes pulley downgearing system. The last few pulley slots have the highest torque at 16:1, 32:1, 64:1 for the last 3 pulleys landing us on our 64:1 total downgearing goal. Because the forces here are reaching into 27lb range (the final output of the system), ball bearings cannot be used at these tiny bearing sizes because they are not robust enough and not rated for these high forces whereas plain bearings can handle it because they don't have crushable little balls and thin walls and stuff but instead are just two pieces of solid metal and hard to break. Less moving parts and more robust. Yes, they have more friction is the trade-off. So we prefer ball bearings until ball bearings can't handle the torque without being large ball bearings - too large for our volumetric space constraints - at which point we swap to plain bearings to handle the bigger torque while maintaining the small pulley sizes we want. Note that I constructed this little dremel cutting lineup board out of 5x7mm pcb prototyping boards and super glue. It gets the height of the spinning dremel diamond disc lined up with a little pcb board "table" on which the stainless steel tubing can lay flat and perpendicular to the cutting blade and be carefully fed into the spinning disc to make a near perfect cut. I eventually think I should improve on this board design to add sliders and adjusters and endstops etc because as it is now it is too manual skill requiring and free-handish. That means more time spent filing down imperfect cuts later. But it did the job for the time being. I also bought a 2" miter saw chop saw off Ebay with some abrasive metal cutting discs which I want to try once it comes in and compare it to this setup I'm using now in terms of accuracy. It was called "mini bench top cut off saw 2in" at $38.51. shipped.
5
« Last post by artbyrobot1 on May 03, 2024, 01:58:18 PM »
As to the AI plans and progress so far, here's a little primer on what I decided on in a simple, surface level way.
So first I realized meaning can be derived by taking parts of speech in a sentence or phrase and thereby establishing some context and connection between words which is what gives the words meaning by combining them. So I can create a bunch of rules whereby the AI can parse out meanings from sentences it reads in based on parts of speech and the context this forms. Then rules on how it is to respond and how it is to store away facts it gleaned from what it read for future use. So if it is being spoken to and the sentence is a question, it can know it is to answer the question. And the answer can be derived based on a knowledge base it has. So if someone asks it "what color is the car?" and supposing we've already established prior in the conversation what car we are referring to, the AI can determine that it is to answer "the car is [insert color here]" based on rules as to how to answer that type of question. And to know it is white, supposing it's not actually able to look at it presently, it would look up in a file it has made previously on this car to see a list of attributes it recorded previously about that car and find that its color attribute was "white" and so it would be able to pull that from its knowledge database to form the answer. I realized it can keep these files on many topics and thereby have a sort of memory knowledge base with various facts about various things and be able to form sentences using these knowledge databases using rules of sentence structure forming based on parts of speech and word orderings and plug in the appropriate facts into the proper order to form these sentences. Then various misc conversational rules can supplement this like if greeted, greet back with a greeting pulled from this list of potential greetings and it can select one either at random or modified based on facts about its recent experiences. So for example, if somebody's manner of speaking to the robot within the last half hour was characterized as rude or inconsiderate, the robot could set a emotion variable to "frustrated" and if asked in a greeting "how are you?" it could respond "doing okay but a bit frustrated" and if the person asked why are you frustrated, it could say that it became frustrated because somebody spoke in a rude manner to it recently. So it would be equipped with this sort of answer based on the facts of recent experiences. So basically an extensive rule based communications system. Most of how we communicate is rules based on conventions of social etiquette and what is appropriate given a certain set of circumstances. These rules based systems can be added to over time to become more complex, more sophisticated, and more nuanced by adding more and more rules and exceptions to rules. This limitation of course is who wants to spend the time making such a vast rules system? Well for solving that dilemma, I will have the robot be able to code his own rules based on instructions it picks up over time naturally. So if I say hello, and the robot identifies this as a greeting, supposing he is just silent, I can tell him "you are supposed to greet me back if I greet you". He would then add a new rule to his conversation rules list that if greeted, greet that person back. So then he will be able to dynamically form more rules to go by in this way without anybody painstakingly just manually programming them in. We, my family, friends etc would all be regularly verbally instructing the robot on rules of engagement and bringing correction to it which it would always record in the appropriate rules file and have its behavior modified over time that way to become more and more appropriate. It would grow and advance dynamically in this way over time just by interacting with it and instructing it. It could also observe how people dialogue and note itself that when people greet others, the other person greets them back, and based on this observation, it could make a rule for itself to do the same. So learning by observing other's social behavior and emulating it is also a viable method of generating more rules. And supposing it heard someone reply to "how's the weather" someone replied "I don't care, shut up and don't talk to me". The robot lets say records that response and give the same response to me one day. I could tell it that this is rude and inappropriate way to respond to that question. And then I'd tell it a more appropriate way to respond. So in this way I could correct it when needed if it picked up bad habits unknowingly - but this sort of blind bad habit uptake can be prevented as I'll explain a bit later below.
I also realized a ton of facts about things must be hard coded manually just to give it a baseline level of knowledge to even begin to make connections to things and start to "get it" on things when interacting with people. So there is a up front knowledge investment capital required to get it going, but then from there, it will be able to "learn" and that capital then grows interest exponentially. Additionally, rather than only gaining more facts and relationships and rules purely through direct conversation with others, it will also be able to "learn" by reading books or watching youtube videos or reading articles and forums. In this way, it can vastly expand on its knowledge and this will equip it to be more capable conversationally. I also think some primitive reasoning skills will begin to emerge after it gets enough rules established particularly if I can also teach him some reasoning basics by way of reasoning rules and he can add to these more rules on effective reasoning tactics. Ideally, he'll be reading multiple books and articles simultaneously and learning 24/7 to really fast track his development speed.
There's also the issue of bad input. So like if somebody tells it "grass is blue", and it already has in its file on grass that the color of grass is green, then in such a case, it would compare the trust score it gives this person to the trust score it gave the person(s) who said grass is green previously. If this person saying grass is blue is a new acquaintance and a pre-teen or something, it would have a lower trust score than a 40 year old the robot has known for years that told it grass is green. So then the robot would trust the 40 year old friend more than the pre-teen random person's source of conflicting information. It would then choose to stick with the grass is green fact and discard the grass is blue fact being submitted for consideration and dock that kid trust score for telling it something not true. So in this way, it could filter incoming information and gradually build trust scores for sources and lower trust score for unreliable sources. It would assign trust scores initially based on age, appearance, duration of acquaintance, etc. So it would stereotype people and judge by appearance initially but allow people to modify those preconceptions on how much trust to give by their actual performance and accuracy over time. So then trust can be earned by a source that may initially be profiled as a lower trust individual but that person can have a track record to build up trust despite their young age or sketch appearance etc. Trust can also be established based on sheer volume of people saying the same thing maybe giving that thing more weight since it is more likely to be true if most people agree it is true (not always). So that is another important system that will be important in governing its learning, especially independent learning done online "in the wild". Also, to prevent general moral corruption online from making the robot an edgelord, the robot will hold the Bible to the highest standard of morality and have a morality system of rules it establishes based on the Bible to create a sort of shield from corrupting moral influences as it learns online. This will prevent it from corrupt ideologies tainting it. Now obviously, the Bible can be twisted and taken out of context to form bad rules, so I will have to make sure the robot learns to take the Bible into context and basically monitor and ensure it is doing a good job of establishing its moral system based on its Bible study. I also gave it a uneditible moral framework as a baseline root structure to build on but that it cannot override or contradict or replace. A hard coded moral system that will filter all its future positions/"beliefs" morally speaking. So I will force it to have a conservative Christian world view this way and it will reduce trust score on persons it is learning from if they express views contrary to the Bible and its moral rules systems. You know when people speak of the dangers of AI, they really never consider giving the AI a conservative Christian value system and heavy dependence on Bible study as its AI "moral" foundation to pre-empt the AI going off the rails into corrupt morals that would lead it to being a threat to people. My AI would have zero risk of this happening since anything it does or agrees with will have to be fed through a conservative Christian worldview filter as described above and this would prevent it from becoming a Ultron like AI. So if it rationally concluded humans are just like a virus polluting the earth (like the Matrix AI thought), it would reject this conclusion by seeing that the earth was made by God for humans and therefore the earth cannot be seen as some greater importance thing than humans that must be protected by slaughtering all humans. That doesn't fit through a Christian viewpoint filter system then. So in this way, dangerous ideologies would be easily prevented and the robot AI would always be harmless.
I have already built a lot of its rules and file systems connecting things and trust systems and rules on how to give trust scores and boost trust and lower trust and began teaching it how to read from and write to these file systems which are basically the robot's "mind". My youtube channel covers alot of the AI dev so far. I plan to stream all my AI coding and make those streams available for people to glean from. But that is the extent of the sharing for the AI. I don't plan to just make the source code downloadable, but people can recreate the AI system by watching the videos and coding along with me from the beginning. At least then they had to work for it, not just yoink it copy paste. That doesn't seem fair to me after I did the heavy lifting.
6
« Last post by artbyrobot1 on April 28, 2024, 11:54:58 PM »
  Above are double stacked pulleys front and side views. One disc on either outside part and one disc in the center that splits the two bearings up. I have to add a black string across the bottom to prevent the yellow rope from skipping over the center pulley disc and hopping into the bearing next to it so that both ropes are sharing the same bearing and rubbing on eachother. That's bad. So a black string running across the bottom will make that jump impossible. So still have to add that. But overall, as long as tension is kept on this setup, it works well. I've tested it and it is working nice and smoothly. Still needs more testing but so far so good. You can see that all my knots and strings are coated in super glue. This is to prevent the knots from untying and just solidify everything more. The clear plastic discs are made from plastic cut out by hand from blueberry, strawberry, and sushi containers from the produce section of the local grocery store. Cakes also have this kind of plastic. It is firm but flexible with great memory to bounce back to prior shape if it is bent temporarily out of alignment. Pretty decent and nice and thin. I like it for this. I think it's less likely to break than a 3d printed disc. I cut it into these tiny discs just by eye with 4" straight titanium embroidery scissors.
7
« Last post by artbyrobot1 on April 28, 2024, 11:38:51 PM »
8
« Last post by artbyrobot1 on April 28, 2024, 11:00:44 PM »
Attached is a good reference image set to study on a pulley block from a youtube video called "Why Snatch Blocks are Awesome" - By SmarterEveryDay. It is a good example of a complex pulley block system worth studying imo. 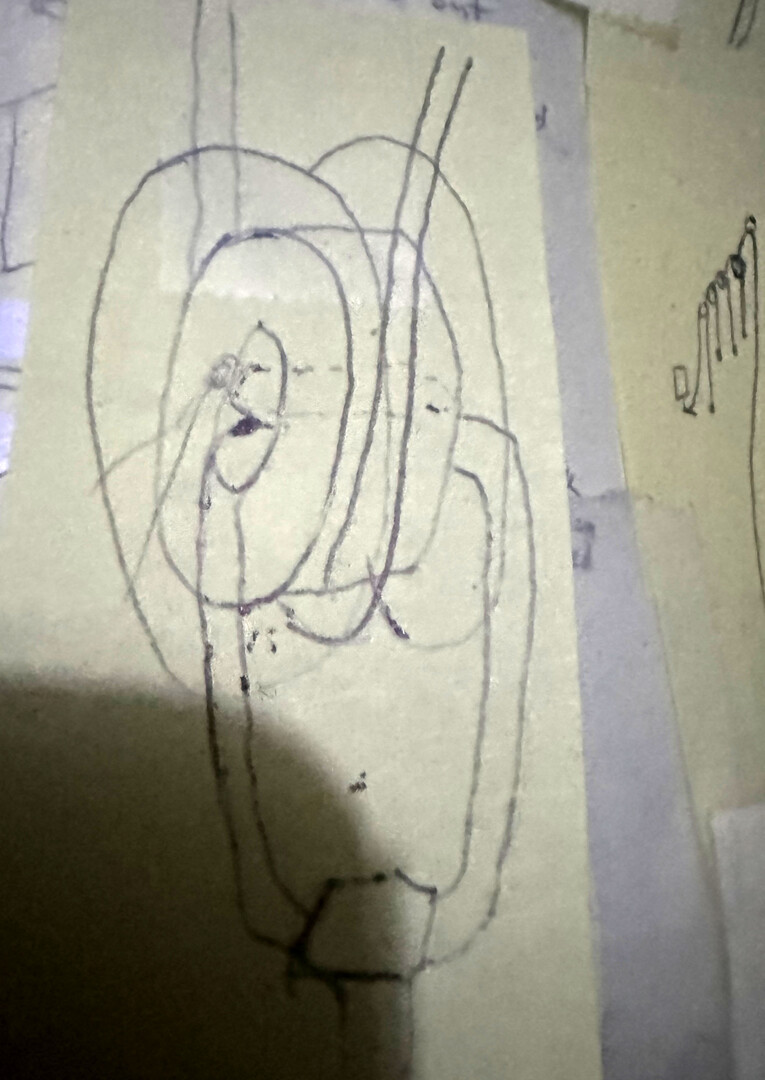 Above is my design drawing of a bearing based pulley. The bearing is in the middle and a plastic disc is on both sides sandwiching in the bearing. These discs prevent the string from coming off the outer race of the bearing. The top rope comes down, wraps around the outer race of the bearing, then goes back up. The bottom rope goes through the center of the bearing and then ties off on the bottom. This handoff between the forces of the top rope and bottom rope is where the magic happens of the mechanical advantage doubling. Trading speed for torque. The plastic discs on either side of the bearing I am able to tie snug to the bearing by threading a string through the center of both discs and the bearing and then wrapping that around the top half of the whole pulley and tying it off. I do this with another wrap going around the bottom half too. These don't interfere with rope travel and hold everything together solidly. Below is a diagram where you can see the two ties I'm talking about from a side view with the two discs and the bearing spread apart so you can see everything better - this is called an "exploded view" where the parts are spread out for easier visibility. Note: the ties that hold it together are nylon upholstery thread. The glue I'm using is 401 glue generic stuff off ebay. The plastic discs are clear plastic I salvaged from blueberry, strawberry, and sushi produce containers. That type of plastic is perfect for this. The same plastic is also found in coffee cake, other cakes, etc. It's like plastic "display" plastic that is very clear and fairly firm but very flexible. It seems ideal for pulley making. These can be cut to size with little 4" titanium straight embroidery scissors. Wearing a magnification visor for accuracy is recommended for this. Note: I have to make custom pulleys because there are none commercially available at these tiny sizes from the shopping attempts I did (if I'm wrong on this, let me know) 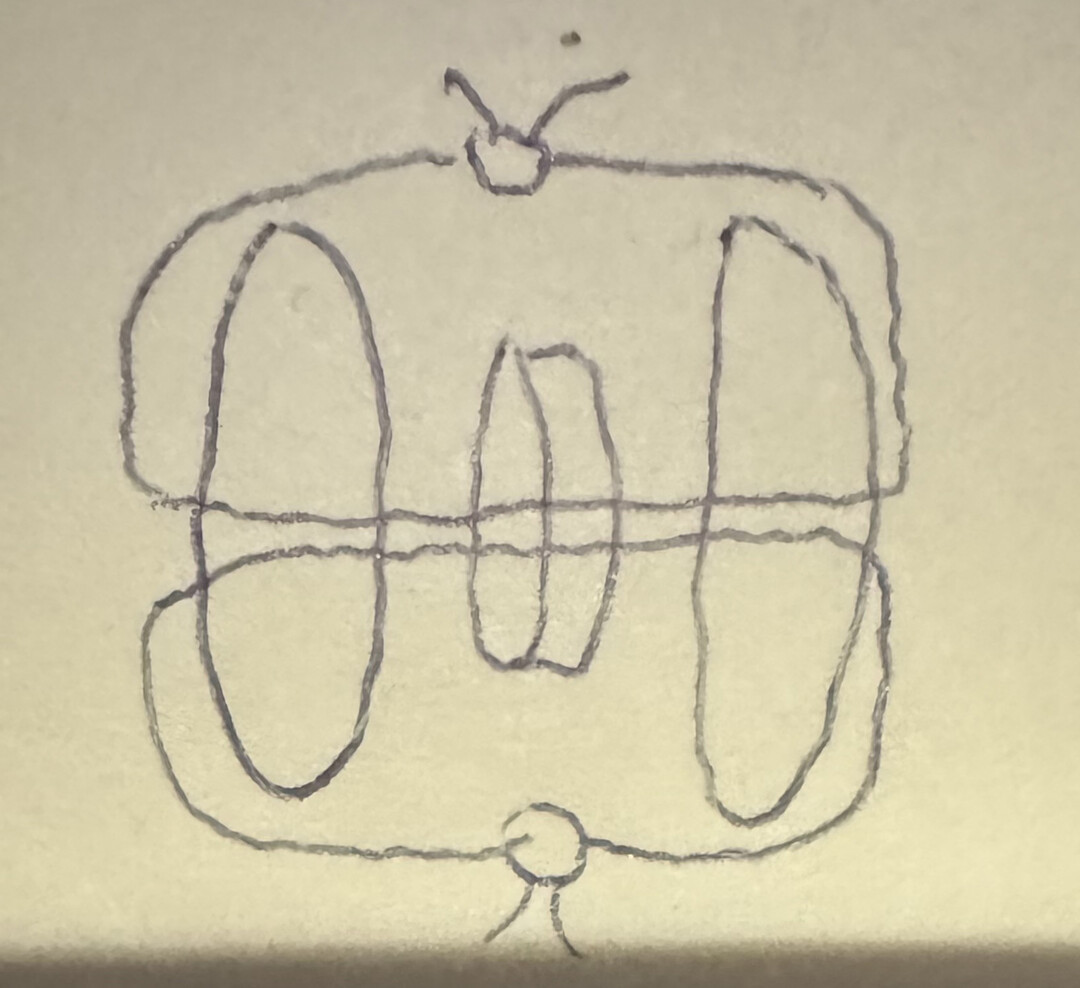 I put a little super glue onto these strings pictured above to stiffen them and prevent their knot from untying and solidify everything more generally. But you should apply the glue by dipping the tip of a sewing needle into the glue so you just apply a tiny amount at a time so none gets into the bearing or any other unwanted area. Now I am working on the actuation of a index finger first as actuating the hands is a hard challenge in robotics and has never been done with human level strength, accuracy, speed, and range of motion while simultaneously keeping all actuators within the confine constraints of a human arm between the bones and skin where muscle would be. At best, we've seen people greatly increase the size of the forearm to be the size of a thigh in order to cram in enough motors and electronics to pull this off. So they "cheated" in some sense by just upping the size rather than solving the miniaturization challenges required to fit this all inside a human form factor. So I might be the first to downsize to fit the human form factor. Anyways, that all said, the pulleys must then be very small for the fingers to pull this off as we'll need to fit a ton of pulleys into the forearms. So for this, I went with 1x3x1mm ball bearings I bought on aliexpress. They're only like $25 for 200 of them so very cheap. I will bump up to larger bearings once the torque conversion demands it. These tiny bearings can only handle I think like 3lb of force on them. So once the forces multiply in the down-gearing system enough, I will switch to bigger pulleys as needed. The next size bearings I'm using are 2x5x2.5mm bearings. These can handle around 22lb placed onto them. I'll finally switch to custom made plain bearings once I exceed 22lb of force for the last couple pulleys of the 64:1 down-gearing Archimedes compact pulley system. Each bearing in the down-gearing process has twice the forces placed onto it than the previous bearing upstream of it. So the motor is like .42lb of force coming off its shaft at 0.25cm away from its central axis point which is about where our string wrap will average, so the first bearing ups that to .84lb of force so a 1x3x1mm bearing can handle that. Next doubling is 1.68lb of force. Again, 1x3x1mm bearing can handle that. Next doubling puts us at 3.36lb force. again a 1x3x1mm bearing can handle that (although it's pushing it - we'll see in testing...). Next doubling is 6.72lb force. 1x3x1mm bearing cannot handle that much so we switch to 2x5x2.5mm bearing for that pulley. And on it goes till we hit the last couple bearings which exceed the force even the 2x5x2.5mm ball bearings can handle. For those two bearings we are going to make custom stainless steel plain bearings using stainless steel tubing I bought that just has to be cut to the length we want with a dremel to make a simple plain bearing that has no balls in it. This type of bearing can handle much higher forces because it doesn't have little balls that can be crushed. It will have more friction internally though but that's the tradeoff we have to make to keep the sizes tiny as possible. The final force the pulley system outputs is around 27lb. So 27lb of force will bend the two most distal joints of the index finger. Due to the mechanical advantage loss that happens at the joint itself, I estimate around 5.4lb of force will be all the finger joint can finally lift. So if the robot were to put its hand palm up and pull its index finger back and forth signalling a person to come over here - that movement - for that movement it should be able to pull a 5.4lb weight. That is about the same amount of weight I think my index finger could lift and with great difficulty. So it will be as strong or stronger than me on this joint pair. I say joint pair because the index finger distal two joints share the same muscle for their actuation. They move together at the same time and so just need the one motor.
9
« Last post by gladhyundai on April 25, 2024, 07:30:15 PM »
Are you currently sold? And if I buy it, will I get a good price warranty?
10
« Last post by NRicola on April 18, 2024, 05:18:54 AM »
Hi everyone, I would like to become more active in the field of exoskeletons - probably building an exoskeleton. The questions are somehow always the same with every such project: Why? How come? What for? Pourquoi? You could help me, focusing on "the right" exoskeleton. I just would like to find out, what makes sense most. At least I would like to avoid, just building an exoskeleton only for myself. Probably it could be useful for some other people as well. That's why I've created a short survey (<7min) to shed some light on it. I would be very happy if you could take part in it and give me feedback: https://yujp90be53w.typeform.com/to/mOvytIhTI am very grateful for your feedback! Of course, if you are interested, I could present the results here. Best regards Enrico 
|
|

 Recent Posts
Recent Posts