Hello,
I'm building a rotational system with 32 rotors/motors that I want to try out under water. And I would like to adjust the speed of all the motors ranging from 0 to 120 RPM and do this with a RC control system. So basically I want to hook all 32 motors up to one receiver but I need some help with the electronics.
I would like to keep every thing as small as possible, therefor I thought of using a MicroFlight Transmitter/Receiver and Solarbotics Geared Pager Motors (25:1) and 3.7v Single Cell Li-polymer Battery(s) with a Max Discharge of 15C (1350mA) (see pix) It is possible to wire several motors on to one MicroFlight receiver in parallel, as long as the total current does not exceed 3 amps or the capability of the battery. (whichever is lower)
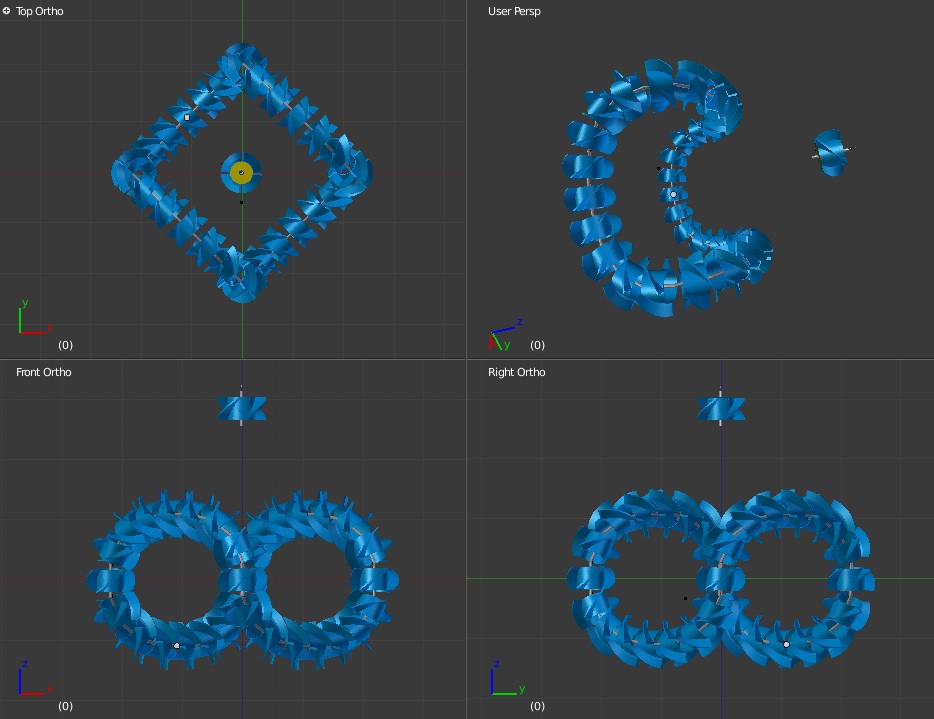
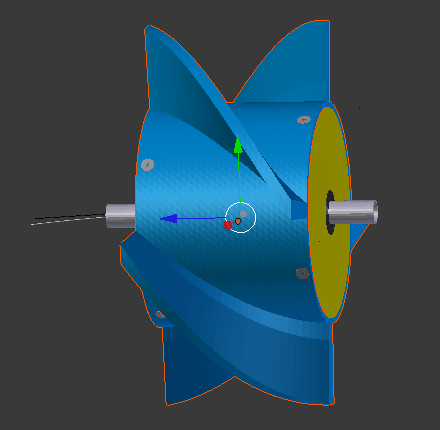
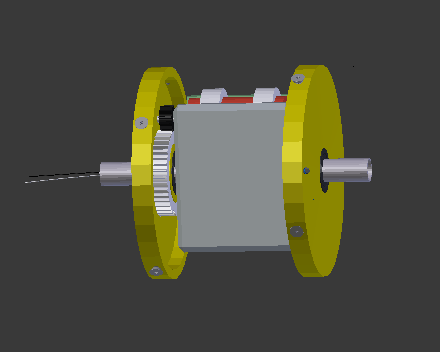
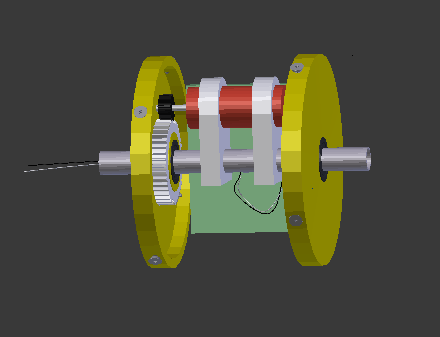
Note, my original plan was to use gears (see design pix) but the Solarbotics motors have a transmission belt output instead of a gear, and I think this is probably safer incase some rotors touch each other etc. The question I now have is the generated rotational speed (RPM) when using 32 motors and that one receiver.
And here is were I would like to get some help or suggestions with figuring out the RPM's, I was thinking:
- input of 3V / 32 (motors) = 0,094V
- Unloaded RPM (3V): 920
- 920 * 0,094 = 86 RPM
- Belt transmission: 86/5 = 17 RPM
So if I go full throttle would my speed be 0 -> 17 RPM ?
If that's the case wouldn't it perhaps be easier to use regular brushed motors (11 Ohm) and a resistor to gear the speed down so I end up with a throttle speed of 0 -> 120 RPM ?
kind regards,
m.
 http://www.microflight.com/Online-Catalog/Receivers
http://www.microflight.com/Online-Catalog/Receivers http://www.solarbotics.com/products/gm15/specs/
http://www.solarbotics.com/products/gm15/specs/Designs: