
 Search Here
Search Here
MISC
Parts List
Robot Forum
Chat
Member Pages
Axon MCU
Robot Books
Shop
Contact
SKILLS
How To Build
A Robot
Tutorial
Calculators
Mechanics
Programming
Miscellaneous
Robots
Space
HARDWARE
Actuators
Batteries
Electronics
Materials
Microcontrollers
Sensors
SCIENCE
Robot Journals
Robot Theory
Conferences
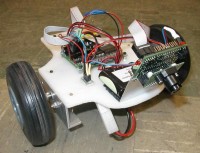
What is a Differential Drive Robot?
Differential drive is a method of controlling a robot with only two motorized wheels.
What makes this algorithm important for a robot builder is that it is also the simplest
control method for a robot.
The term 'differential' means that robot turning speed is determined by the speed difference between both wheels, each on either side of your robot. For example: keep the left wheel still, and rotate the right wheel forward, and the robot will turn left. If you are clever with it, or use PID control, you can get interesting curved paths just by varying the speeds of both wheels over time. Dont want to turn? As long as both wheels go at the same speed, the robot does not turn - only going forward or reverse.
The differential drive algorithm is useful for light chasing robots. This locomotion is the most basic of all types, and is highly recommended for beginners. Mechanical construction, as well as the control algorithm, cannot get any simpler than this.
Note that this algorithm doesnt just work for wheeled robots, but is also the same algorithm you must use for tank tread type robots and biped robots. For examples of differential drive robots, see my sumo robot, mobipulator robot, and robot boat.
How to Use This Algorithm
Place two motorized wheels on your robot, one on either side. Send your
move commands to the motors by either using
a motordriver or H-bridge.
Or if you are using servos, just send the required pulse width. Note that
this algorithm works great with the photovore algorithm.
pseudocode:
-
input sensor reading
make decision based on sensor reading
do one of below actions:
to drive straight both wheels move forward at same speed
to drive reverse both wheels move back at same speed
to turn left the left wheel moves in reverse and the right wheel moves forward
to turn right the right wheel moves in reverse and the left wheel moves forward
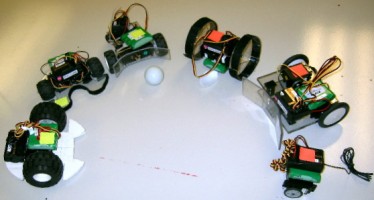
Two robot soccer teams of custom differential drive robots:
Society of Robots copyright 2005-2014