
 Search Here
Search Here
MISC
Parts List
Robot Forum
Chat
Member Pages
Axon MCU
Robot Books
Shop
Contact
SKILLS
How To Build
A Robot
Tutorial
Calculators
Mechanics
Programming
Miscellaneous
Robots
Space
HARDWARE
Actuators
Batteries
Electronics
Materials
Microcontrollers
Sensors
SCIENCE
Robot Journals
Robot Theory
Conferences
List of robot sensors, with detailed information and uses.
Click for a quick sensor reference guide.
|
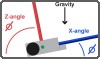
Accelerometer
Detects motion, vibration, and angle with respect to gravity. |

|
Advanced Sensor Interpretation
Tired of sensor oscillation? Want higher sensor accuracy? Learn how to make a precision mathematical representation of any sensor. |

|
Blackfin Camera with Axon Tutorial
Learn how to use the Blackfin Camera with the Axon (and other) microcontrollers. |
|
Color Sensors
Learn how robots 'see' color, and how to build your own color sensors. |
|
Current Sensor
Measure current and power use accurately with a current sensor. |

|
Digital Compass
Detects orientation with respect to Earth's magnetic field. |
|
Encoder (Slot, Rotary, Linear)
Used to determine translation distance, rotational velocity, and/or angle of a moving robot part. Also instructions on how to make your own encoder wheel. |

|
Infrared Emitter/Detector
Emits and detects IR. Can be used for signalling, obstacle avoidance, and color detection. |

|
Load and Torque Sensors
Measure torques and other forces directly for your robot system. |

|
Mercury Tilt Switch
A switch that gives a binary output, depending on the angle with respect to gravity, using mercury. |

|
Photoresistor
Changes resistance with detected light. Can be used for simple robot behaviors, such as obstacle avoidance or photovores. |

|
Robot Computer Vision
Using a digital video camera with highspeed processing to detect the 'real world.' |

|
SharpIR Rangefinder
Detects obstacle range from inches to several meters. Modulated, hence immune to ambient IR. |

|
Sonar
Detects obstacles and can determine object softness/hardness through echolocation. |

|
Tactile Bumper Switch
Detects physical contact, such as for robot collision detection. |

|
Voice Recognition Robot Tutorial
Learn how to give your Axon powered robot basic voice recognition. |
|
|
|
Society of Robots copyright 2005-2014