
 Search Here
Search Here
MISC
Parts List
Robot Forum
Chat
Member Pages
Axon MCU
Robot Books
Shop
Contact
SKILLS
How To Build
A Robot
Tutorial
Calculators
Mechanics
Programming
Miscellaneous
Robots
Space
HARDWARE
Actuators
Batteries
Electronics
Materials
Microcontrollers
Sensors
SCIENCE
Robot Journals
Robot Theory
Conferences

note: this page is a place holder until a better tutorial is written
Tactile Bump Sensors are great for collision detection, but the circuit itself
also works fine for user buttons and switches as well.
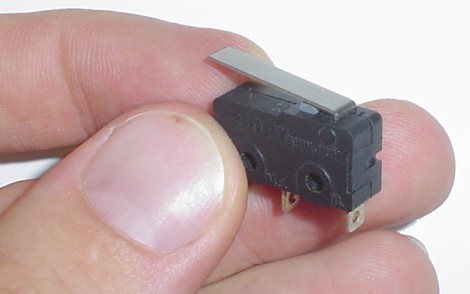
There are many designs possible for bump switches, often depending on the design and
goals of the robot itself. But the circuit remains the same. They usually implement a
mechanical button to short the circuit, pulling the signal line high or low. An example
is the microswitch with a lever attached to increase its range, as shown above.
There are several versions below, depending on how you plan to use the circuit and your available switches. For the resistor use a very high value, such as 40kohms.
Tactile Bump Sensor Circuits

|
Voltage goes high with contact |
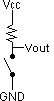
|
Voltage goes low with contact |

|
More efficient switch for 3 lead switches (use for microswitches) |
||
Tips and Uses
Tactile switches only work if your robot can stop instantaneously (like when moving slowly).
There is no point ramming the wall, then the switch saying 'oops, wall here.' This is why
more advanced robots often use sonar and
IR because it gives a slowing down buffer zone.
You will need several to cover the front and/or back of your robot.

Availability and Cost
Microswitches easily available under $1. Use a popsickle stick lever with it.
Power Requirements
None.
Society of Robots copyright 2005-2014