
 Search Here
Search Here
MISC
Parts List
Robot Forum
Chat
Member Pages
Axon MCU
Robot Books
Shop
Contact
SKILLS
How To Build
A Robot
Tutorial
Calculators
Mechanics
Programming
Miscellaneous
Robots
Space
HARDWARE
Actuators
Batteries
Electronics
Materials
Microcontrollers
Sensors
SCIENCE
Robot Journals
Robot Theory
Conferences

I have never built a robot before, is the Axon right for me?
I am a very weak programmer, is that a problem?
Do you offer full customer support?
Is there a warranty, or refund, for a damaged product?
The green LED is flashing but nothing is working, what's wrong?
Why am I getting gibberish from the UART?
What happens if I 'brick' the Axon?
What happens if I fried a port pin?
I'm using the 3.3V line, and the USB isn't working!
The Axon resets often, what's wrong with it?
The Axon resets randomly on rare occasions, and the batteries are fine.
I just saw sparks/smoke come from my Axon!
Why does the voltage regulator get really hot?
What's up with that big capacitor on the Axon?!
How do I reconfigure the USB?
I deleted the bootloader, how do I reupload it?
What fuses does the Axon use? How do I change them?
Is the Axon RoHS compliant and lead-free?
The bootloader isn't working!
How do I set up JTAG?
The USB bootloader is really slow!
Got 'CRC-Error', USB stops working
Axon resetting, and I'm using Sharp IR
Can I use Mac or Linux?
I have never built a robot before, is the Axon right for me?
This really depends on two factors.
First is your budget. If you have a very
tight budget, the Axon will probably not be right for you. The Axon
comes with many features that you will probably never use for an ultra low budget project.
If you are on a tight budget, the $50 Robot
would be more appropriate.
The second is on your long-term plans. All of the cheap boards out there are designed to be cheap - they are not abundant with features. They tend to not have a power bus (meaning they require additional wiring), and they tend to support up to only 8 servos and 8 sensors maximum. The Axon however has 3x more features available for your future growth and future robots. If you plan to build more advanced robots in the future, the Axon would be the better long term choice.
I am a very weak programmer, is that a problem?
No, it is not! All the complicated programming has already been done for you. Almost any feature can be used by calling simple one-line functions, of which is listed in the Axon function list.
Do you offer full customer support?
SoR offers more support than any other controller or website on the market: admin's proven personal support, plus the fairly large and growing SoR forum community. If you have problems or questions, there are three steps you should take:
1) Check the guides and datasheets
2) Search the forum for similar questions
3) Ask your question in the forum, including 'Axon' in the subject line
And if you have a more general 'how do I ...' question, remember to always search the SoR site first before asking in the forum. Its probably been already asked! You might also find the general robot FAQ and the must read robot tutorials list very useful.
Is there a warranty, or refund, for a damaged product?
No. I individually test all Axon boards before shipping, and so I guarantee that no product is shipped damaged. If your board fails due to improper use, post a question in the forum for help to revive or at least partially revive your Axon. This may often involve soldering and/or replacing individual components on the board, or modifications in software.
The green LED is flashing but nothing is working, what's wrong?
The green LED flashes when the Axon is reset - usually when battery power drops too low. Unpower your board, swap to a fully charged battery with the proper voltage, and try again. Note that the green LED could also flash if you write code to do just this, so if the battery is fine, then your code could be wrong . . .
If you are using noisy electronics on the ADC line (like Sharp IR), resets can also occur.
Why am I getting gibberish from the UART?
Giberish means your COM port is correct but baud rate is set improperly. There are two places to set it:
1. hyperterminal
2. your axon program
I typically just set *everything* by default at 115200 or 230400 for *all* of my projects to avoid potential conflicts.
What happens if I 'brick' the Axon?
The term 'bricking' is what happens when you play around with the fuse settings not knowing what you are doing. Or if you under-power your Axon during programming, causing a fuse corruption. If you set the wrong fuse, you could end up preventing the Axon from reprogramming again - including preventing the changing of the fuse settings. This is a very common 'stupid' mistake - all the experts have bricked a microcontroller at least once in their lifetime! I definitely have. The most likely event is that you set the frequency clock fuse wrong, and that you will need to apply an external clock using a function generator or a second microcontroller.
1. Unsolder the silver-colored crystal and the two small capacitors right under it.
2. Apply a square wave to XTAL1 (say 125KHz, 250KHz, etc). Ground to ground.
3. Using a hardware programmer, change the fuse settings back to a 16MHz crystal.
4. Lastly, solder the crystal and caps back on.
These are the correct Axon fuse settings and more instructions.
What happens if I fried a port pin?
The ATmega640 is very resilient to abuse. If for example you accidentally plug in ground to an output pin while the pin is set to high, the pin will most likely fry. However, the rest of the microcontroller should still work - just use a different pin. A very likely way to fry a port pin is plugging in the battery wrongly to it, or a device attached to it doesn't act as expected. If you are worried about damaging a pin, place a resistor of about 4kohm between the port pin and your external device signal pin.
I'm using the 3.3V line, and the USB isn't working!
The 3.3V line can only supply a limited amount of current - please see Current Tolerances. Make sure you aren't over drawing current. Also, add a 4.7uF tantalum capacitor (polarized) between 3.3V and ground. A ceramic capacitor may work for your application, so its worth a try if you have one on hand.
The Axon resets often, what's wrong with it?
Chances are this is a battery problem. First, use a multimeter to check the input voltage while your Axon is turned on. The original source code is designed to flash the green status LED during a reset - constant flashing means constant resetting. Also, make sure you do not have the WDT (watch dog timer) fuse set, and that your code isn't directly causing the reset.
The Axon resets randomly on rare occasions, and the batteries are fine.
This could be because electrical noise is causing a hardware reset on the reset pin. Flip the Axon over, and on the ISP header solder a 0.1uF to 1.0uF ceramic capacitor between RESET and GND. This could also be because you are drawing huge amounts of power when a motor is turned on, or perhaps you have something occasionally shorting power.
I just saw sparks/smoke come from my Axon!
This means something was shorted. Make sure everything is plugged in correctly. The Axon is designed to resist damage, so you have a good chance it will still retain functionality after you identify and rectify the problem.
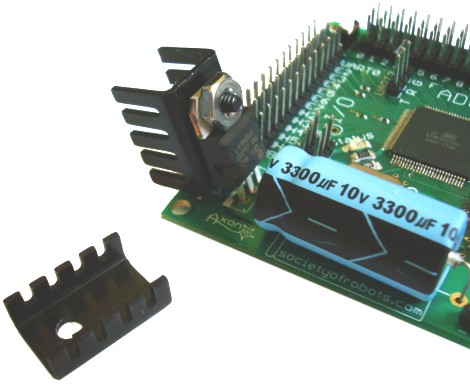
Why does the voltage regulator get really hot?
There are two reasons it could overheat. First, something could be shorting. Unplug your power and check your wiring. The other reason could be you are over-drawing power - the voltage regulator is rated to not handle more than about 1.5A of current. The voltage regulator has thermal shutdown features, meaning that if it overheats, it will turn off until it cools down. If you'd like to push the power limits, add a heat sink onto the back of the voltage regulator as shown here:
What's up with that big capacitor on the Axon?!
The Axon was designed to handle abuse and unpredictable noise environments. The big capacitor acts as a noise suppression device. Where does this noise come from? Well, your external hardware connected to the Axon! For example, suppose you have 40 servos connected to the Axon, and suddenly it turns all 40 on at the same time. A huge sudden power drain will occur! If your batteries cannot handle it, the voltage will suddenly drop, causing a hardware reset of your microcontroller. The big capacitor is there to help mitigate this problem.
How do I reconfigure the USB?
The CP2102 USB to UART setup has been designed so that it can be powered from both USB and/or a battery. However, sometimes you may wish to change the internal configurations of the USB - such as define the power source, or change the device name. To learn more, have a look at the application software on the manufacturers page. Make sure you have the USB plugged in and that no other software is using the USB port (such as hyperterminal) before connecting.
I deleted the bootloader, how do I reupload it?
To reupload the bootloader, you will need a hardware programmer. I recommend the ATAVRISP2 which you can buy for about $36 plus shipping:

There are many benefits to using a hardware programmer over the included bootloader - faster uploading, easier to change fuses, and much more.
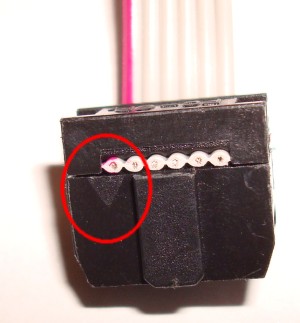
To connect it to your Axon, just match the triangle on both the ISP header and the Axon board:
Next, power up the Axon and open up AVR Studio. Click on the AVR button to connect to the Axon:
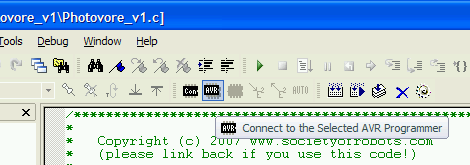
A new connection window should come up. Select MKII as the programmer.
Then, browse for the bootloader.hex file and upload it.
You can download the bootloader .hex to go onto the Axon here:
Axon USB Bootloader
Remember to power up your Axon *before* programming it. If you don't, sometimes it will program but the power delivered is not always enough to keep the commands from getting corrupted. On very rare occasions it could modify the fuses, potentially the clock fuse, and thereby 'brick' your Axon (a bad thing).
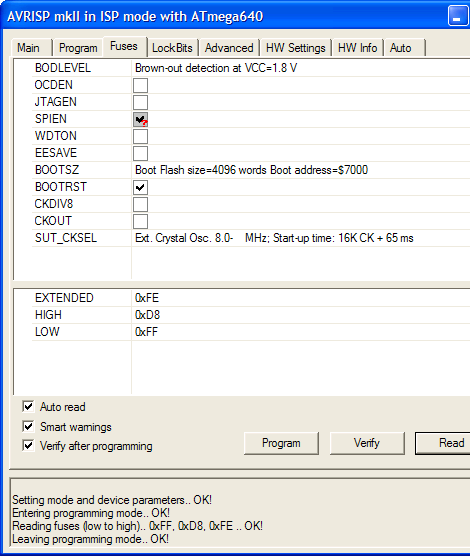
What fuses does the Axon use? How do I change them?
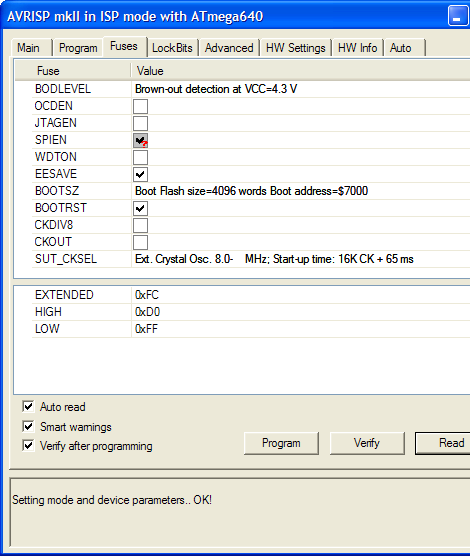
If you purchased your Axon after May 1st, 2009, then your fuse settings will be as below. And if you ever need to redo your fuses, this is what you should set them as. The best way to change/set fuses is to use a hardware programmer (such as the MKII). Open up AVR Studio, connect to the Axon, and go to the fuses tab as shown below.
Enter in the fuses as shown, then press Program.
DO NOT CHANGE FUSES IF YOU DO NOT KNOW WHAT YOU ARE DOING
If you purchased your Axon before May 1st, 2009, these are the default fuse settings. They were changed as to allow EEPROM functionality.
Is the Axon RoHS compliant and lead-free?
Due to an unfortunate manufacturer error (not the fault of SoR), the first batch of Axon microcontrollers (June 2008) were made using lead-based solder. All boards made in this batch have a small black L written on the backside. Future batches will be RoHS compliant and lead-free, most likely April of 2009.
The bootloader isn't working!
If you are having trouble getting the bootloader to work, there are several steps you need to follow.
Most likely, you simply selected the incorrect COM port. Go to the device manager to verify the comport you selected is the COM port your Axon is connected to. For an example, see STEP 3: Configure BAUD.
If still no luck, read through the Bootloader Debug List
How do I set up JTAG?
A JTAG Debugger is useful for code debugging, but requires external hardware. Here are instructions on setting up JTAG as provided by an Axon user.
wiring:
TDI connects to ADC 7
TDO connects to ADC 6
TMS connects to ADC 5
TCK connects to ADC 4
nTRST connects to ISP pin 5 IRST
GND connects to ADC 0 GND
Vsupply connects to ADC +5V
Enable the JTAGEN fuse in AVR Studio. Note that this will disable ADC 4-7.
Warning: When finished using JTAG, disable the JTAG fuse before attaching sensors to ADC 4-7! Otherwise, you could potentially damage those pins (and maybe your sensors) permanently.
setting up software:
Under debug menu set the debug platform and device to JTAGICE MKII.
Then change the following lines in the Axon makefile:
# Debugging format. # Native formats for AVR-GCC's -g are stabs [default], or dwarf-2. # AVR (extended) COFF requires stabs, plus an avr-objcopy run. DEBUG = dwarf-2The option DEBUG='stabs' must be changed to 'dwarf-2' so that the object file can be used by the debugger.
In configuration properties you have to set up the location where the object file (i.e. Axon.elf) is located in the filesystem if you use the Axon's makefile.
Next, 'clean' before you build your object file.
And then you build and debug away with jtag.
The USB bootloader is really slow!
If you are using Windows XP, do not upgrade to SP3. The bootloader takes about ~6 seconds with SP2, and ~45 seconds with SP3. There are no actual benefits to using SP3, however many problems with it have been reported. See this forum post for more info.
To remove SP3, go to:
Start -> Control Panel -> Add Remove Applications -> Windows XP SP3
and remove it.
Got 'CRC-Error', USB stops working
Do you get a 'CRC-Error' from the bootloader and then the USB stops working? We aren't entirely sure the cause yet for this rare error, but we have a few temporary solutions you can follow at this forum post. It is believed that if you allow the Axon about ~5 seconds between resets that the problem won't occur.
Axon resetting, and I'm using Sharp IR
Several users have reported that simply placing three Sharp IR rangefinders on the Axon can cause constant reseting. The reason is because these sensors are extremely noisy electrically. There are two solutions, and I recommend doing both. The first is to place a ~10uF or higher ceramic capacitor connecting ADC power and ground. This will keep the voltage more stable. The second is to place a surface mount 10nF ceramic capacitor and a 530 ohm resistor directly on the Sharp IR, shorting ground and the sensor output pin (the capacitor and resistor placed/stacked in parallel). This will greatly improve Sharp IR accuracy, too.
Can I use Mac or Linux?
The bootloader is not directly Linux/Mac compatible. To learn more about programming with a Mac, check out this forum post and this one too. You could use a Windows emulator like wine or dosbox. You could also use an external hardware programmer for programming - please see the FAQ on how to upload code with a programmer. Finally, a new FBOOT version for OS X and Linux.
Society of Robots copyright 2005-2014