
 Search Here
Search Here
MISC
Parts List
Robot Forum
Chat
Member Pages
Axon MCU
Robot Books
Shop
Contact
SKILLS
How To Build
A Robot
Tutorial
Calculators
Mechanics
Programming
Miscellaneous
Robots
Space
HARDWARE
Actuators
Batteries
Electronics
Materials
Microcontrollers
Sensors
SCIENCE
Robot Journals
Robot Theory
Conferences

Setting Up Hardware
Part #1: Installing Software
Part #2: Setting up Hardware
Part #3: Using the Bootloader
STEP 1: Install USB Drivers
If you have Windows, simply plug in your Axon Mote by USB to install the USB drivers. Windows will automagically detect the new hardware, so just follow the Windows prompts.
note: The version of drivers that comes with Windows is out of date and very buggy. It is strongly recommended you upgrade your FTDI USB drivers, especially if you experience problems.

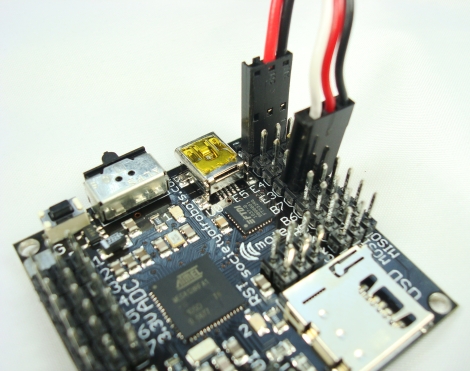
STEP 2: Connect Power
The Axon Mote can be powered directly from USB. The power switch is an On/Off/On type, so it is off when in the center. The Mote knows whether the switch is Left or Right, letting you use a single program for both master and slave configurations. The LEDs on the Mote are software controlled, and should turn on only if programmed to do so.

There are other power options available, so please read the datasheet for more information.

STEP 3: Test USB
Download this hyperterminal config file, then double click it.
For instructions on configuring it correctly, check out my hyperterminal tutorial.
Select the correct COM port and baud rate (115.2kbps), then click connect. You should immediately start seeing data.

Remember, if your receiving junk data, that means you improperly set up the baud rate but everything else is working fine. It also means you should read the FAQ on UART gibberish.
If you don't like HyperTerminal, another popular terminal program to try is Tera Term.
Notes: To learn more about BAUD rates, read the UART tutorial.
Select COM port. To determine the correct COM port, in Windows, click:
Start->Settings->Control Panel->System
A new window will come up called 'System Properties'. Open the Hardware tab
and click 'device manager'. A new window should then pop up. Click 'Ports (COM & LPT)' to find it.
The Axon bootloader only allows COM1 to COM4. Device Manager allows you to reassign the COM port of your Axon Mote.
STEP 4: Connect Sensors & Servos
Servos should be connected to any unregulated power headers of the Axon Mote. Ground (black wire) is always the outside column, red (power) is always the center column, and signal is always the inner column.
Analog sensors, such as the Sharp IR Rangefinder should always be connected to the regulated 3.3V bus (unless they are < 3.3V sensors).
warning: Applying more than ~2V to the ADC will cause the Rx of the wireless transmitter to stop working. Some SharpIR rangefinders will output higher than 2V, so a voltage divider must be added to the sensor output.

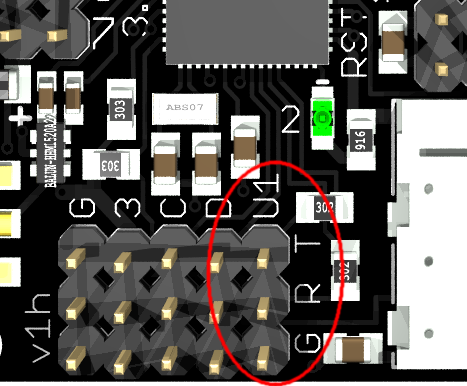
STEP 5: Connect UART
The UART is a way for the Axon Mote to communicate with other hardware through serial, such as a camera, bluetooth, or GPS. It's as easy as plug and play.
T is for transmit, R is for receive, and G is for ground (make sure external devices share a common ground!).
There are two available hardware UART ports, but the USB uses one of them. Additional [slow] software UARTs can be created using WebbotLib.
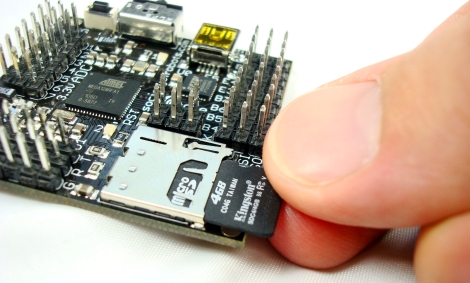
STEP 6: Insert uSD Card
Optionally, you can use a uSD (micro-SD) card to store various forms of data. The uSD
is NOT included, nor is it required to use the Axon Mote. Any local pharmacy
and RadioShack will sell uSD's, while the recommend online stores to purchase them would
be [uSD cards at Amazon]
and [uSD cards at NewEgg].
Your cellphone is likely to have a uSD and reader (back up your data before using it). This is the uSD I use, with a handy USB reader.
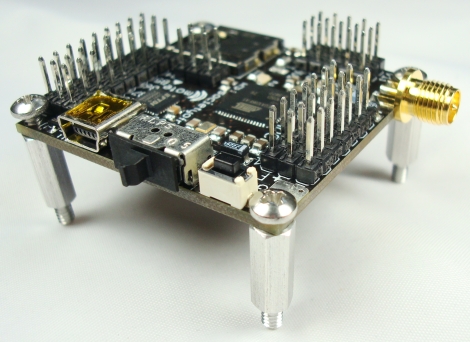
STEP 7: Mount Axon Mote to Robot
It is recommended to mount your Axon Mote to your robot using spacers. Here is an example with four 0.75" spacers and 4-40 screws (not included). DO NOT use a metal screw where the button is, as you might short the button pin with ground pad. Plastic screws preferred.
Now that you are done setting up hardware, continue to
Part #3: Using the Bootloader >>>
Society of Robots copyright 2005-2014