
 Search Here
Search Here
MISC
Parts List
Robot Forum
Chat
Member Pages
Axon MCU
Robot Books
Shop
Contact
SKILLS
How To Build
A Robot
Tutorial
Calculators
Mechanics
Programming
Miscellaneous
Robots
Space
HARDWARE
Actuators
Batteries
Electronics
Materials
Microcontrollers
Sensors
SCIENCE
Robot Journals
Robot Theory
Conferences
About the Robot Boat, and Thailand
This robot boat was originally built for a Thai art contest, for the 2006 Loy Krathong celebration.
An art contest? A Loy what what? Thai?!? Ok let me explain . . .
Loy Krathong is the second most popular Thai holiday of the year, right behind the Songkran festival - the country wide all day long waterfight . . . So Loy Krathong, pronounced Loy Gratawng, is when Thai people get to make little pretty floating things out of banana leaves or whatever and place a candle on it. They then Loy (float) the Krathong (the floating thing) out onto the river. There are lots of stories behind it . . . But basically if your Krathong floats down the river past where the eye can see, and the candle doesnt go out, then you and your girlfriend/boyfriend will live together forever in happiness. Thai version of Valentines Day, I guess.

So they have a contest every year for who can make the prettiest and coolest Krathongs. Sounded like fun, but me being an engineer I can do better. What if you can remote control your Krathong past the horizon? [evil grin]
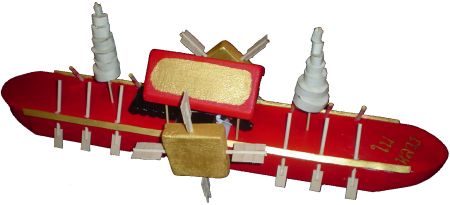
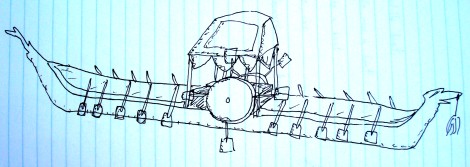
Well there isn't much I can 'robot up' in a floating banana leaf, so instead I decided to model my Krathong on the Thai Royal Barge - basically a giant canoe for the Thai king. This is what it looks like:

Now that you understand why my boat looks so odd, here is the video . . .
And now for the important stuff . . .
Designing a Robot Boat
There are several important things you must consider when building a robot boat. There are weight issues,
balance issues, hydrodynamics, waterproofing,
the actuator, and sensing problems. There are many different
designs you can do, so I will just go over what I did and what I learned and hope you can apply it to your
own project.
Weight
Weight is important when loading your robot boat with various equipment. It needs
motors, batteries, sensors,
controllers, it all adds up.
If the weight is too much, the boat will sink dangerously low - or at least
add a lot of drag to its movement. Fortunately, this is an easy calculation to do. First add up the weight
of all components for the entire boat, including the hull. Then estimate the desired length and width of your boat hull.
Here is how I derived the calculation to determine how much your boat will sink under a given weight and hull dimensions:
density * volume = mass
density of water * boat volume under water = boat weight
density of water * length * width * depth = boat weight
sinking depth = boat weight / (density of water * boat length * boat width)
-
* Note that my hull was very close to a rectangular cube, so if your hull has a different shape, use the average
hull width expected to go underwater.
You want the sinking depth of your boat to be as minimal as possible, but yet deep enough the actuators can go into the water. If you are making a robot sub, then you want the sinking depth to equal the height of the sub to obtain neutral bouyancy. Density of water is about 62 lbs/foot, and in salt water about 64 lbs/foot.
Hull Design
The rule of thumb is to imitate the shapes of actual boats, as they have been well tested by real engineers.
The hull of my boat was built out of a block of pink foam core, typically
used for home insulation, and available super cheap at any local Home Depot. I found mine in a scrap pile in the back, but they sell
door size blocks for under $15. To cut the foam core I used a bandsaw, and then smoothed the hull down with
fine grain sandpaper.

I then painted over it with a single layer of acrylic paint for increased water protection, but also to increase the highly quantitative 'pretty-ness factor.'
There are several types of hull shapes, so here is a quick description of each:
|
Flat Bottom Hull - Easiest to make and low water resistance. Wobbles a lot in waves. Examples of flat bottom boats might be Jon boats, small utility boats, and some high--speed runabouts. |
|
Vee Bottom Hull - Very little wobble in waves, but more water resistance. Many runabouts use the vee-bottom design. |
|
Round Bottom Hull - Works well at slow speeds, but requires a keel/stabilizer. Many trawlers, canoes and sailboats have round bottoms. |
|
Multi-Hull - The most stable of all designs, but also the most complicated. Catamarans, trimarans, pontoon boats and some houseboats carry the multi-hull design. The wide stance provides greater stability. |
The bottom of my hull was completely flat, as making other shaped hulls can cause complications. Things to keep in mind when choosing a hull is balance (top heavy = bad), turning speed, resistance against bobbing in waves and blowing over in wind, and manufacturability (complex shapes could be more effort than they are worth). I would say my flat bottom design worked well, but was not stable enough in strong winds.
Actuators
The Royal Thai Barges use human paddlers for actuation, but that wasnt possible for the robot so I need another method.
To keep it simple and remain as true as possible
to how it should look, I chose the paddle wheel. Despite not even remotely attempting to optimize the paddle wheel,
it performed incredibly well. I wanted to quickly make the boat remote control
for the competition, so this required me to use servos
(learn how to waterproof a servo).
Higher speed DC motors
would probably work better, but I was looking for something quick and simple.
Unlike propellor driven boats, this type of actuation allows for the use of the most simplest robot control algorithm -
differential steering. Propellor driven boats are designed for speed and
efficiency, but they dont perform so well in maneuverability. They also pose significant control algorithm challenges.
Even more important, a paddle wheel boat can do 360's without ever moving forward.
Paddle Construction
Just to emphasize once more, my paddle wheel design is not optimal and was based on artistic value over functionality.
If you were to do a paddle wheel design, I suggest you based the design off a river boat paddle wheel, and place one
wheel on each side of the boat as I did.
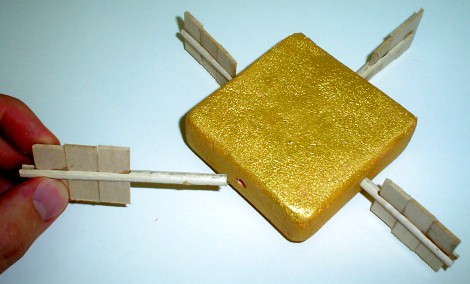
A river boat paddle wheel design:

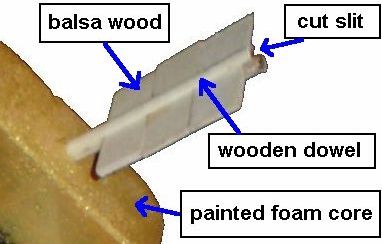
The method I used was to take a wooden dowel, bandsaw a slit into it, place pieces of balsa wood into the slit, then superglue the pieces in. The wooden dowel was then press fit into a block of foam core:
Control, Sensing, and Electronics
The robot boat was based off of a simple remote control design, using a
6V NiMH 1800mAh battery, a reciever, and two HS-311 servos.
I had additional plans to attach a scanning Sharp IR rangefinder with an additional servo
for obstacle avoidance, a digital compass for directional navigation,
and a microcontroller for control. Note that a digital compass works very well on
open water, as there is nothing to disturb the magnetic field near the boat.
But after doing initial tests in a lake, I found that it had serious trouble going against strong winds. I was also not willing to go through the trouble to put a GPS on it for localization. Although I didnt do autonomous control, I would have put a backup remote control system on, so I can switch it on whenever the autonomous robot boat got stuck somewhere I didnt want to swim to . . .
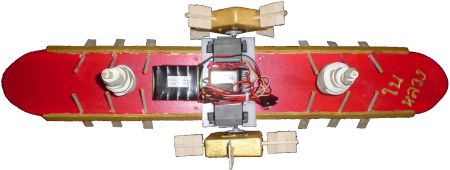
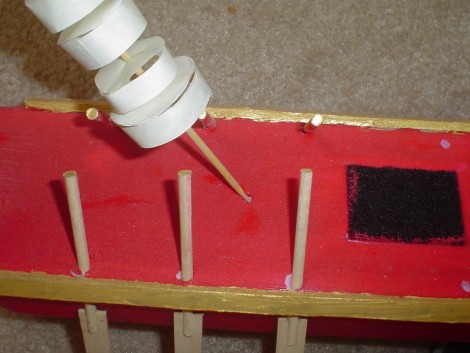
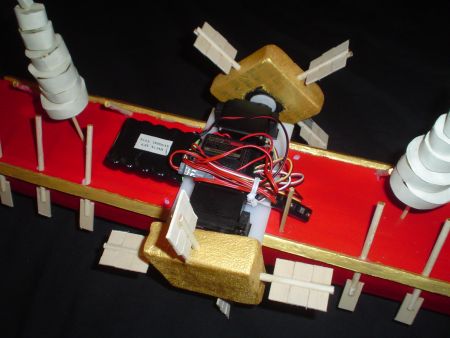
This is a close-up image of the remote control system:
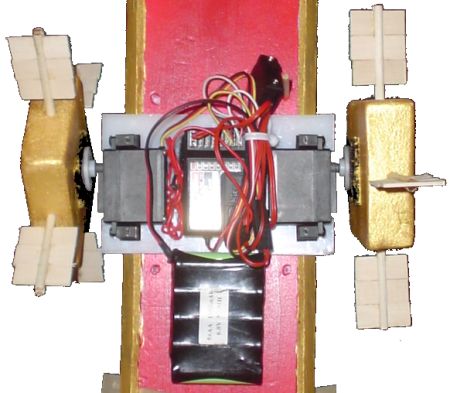
See that white square thing under the electronics? I used a 1/8" sheet of HDPE to screw mount my servos in place, and then velcroed the sheet to the unpainted foam core surface. The reciever and battery was velcroed in the same manner.
I concluded that for navigating lakes the robot boat has a sub-optimal design. If I was to reattempt it, I would:
- use a shorter, wider, hull
- design the hull after a river boat shape
- optimize paddle wheels
- use DC motors for highspeed paddling
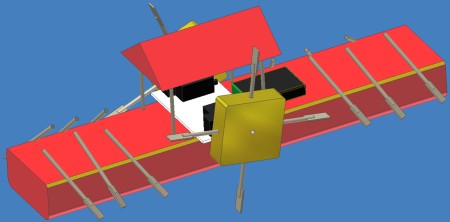
CAD Design
I did a quick design in CAD to make sure everything fit just right.
Feel free to drag around the CAD file:
You may download the Thai Boat DWF here.
Additional Images
These are some additional photos I took:








Society of Robots copyright 2005-2014